第1题
A.线性时不变系统
B.线性时变系统
C.非线性时不变系统
D.非线性时变系统
第2题
A.转移矩阵
B.邻接矩阵
C.状态矩阵
D.优先矩阵
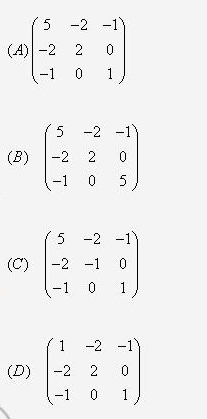
第3题
已知3阶矩阵A的逆矩阵为,则A的伴随矩阵A*的逆矩阵为()。
第4题
第5题
第6题
第7题
A.是构成矩阵相位和频率方向上数目的最小单位
B.像素的大小是由FOV和矩阵的比值决定的
C.FOV不变时,矩阵越大像素尺寸越小
D.FOV不变时,矩阵越小像素尺寸越小
E.矩阵不变时,FOV越小像素尺寸越小
第8题
第9题
设白噪声序列ω(n)作用于线性移不变系统H(z)的输入端,在输出端上得到一个实平稳信号x(n)。已知x(n)的自相关序列为
Rxx(m)=0.5|m|,-∞≤m≤∞
第10题
1. 搜题次数扣减规则:
备注:网站、APP、小程序均支持文字搜题、查看答案;语音搜题、单题拍照识别、整页拍照识别仅APP、小程序支持。
2. 使用语音搜索、拍照搜索等AI功能需安装APP(或打开微信小程序)。
3. 搜题卡过期将作废,不支持退款,请在有效期内使用完毕。
为了保护您的账号安全,请在“上学吧”公众号进行验证,点击“官网服务”-“账号验证”后输入验证码“”完成验证,验证成功后方可继续查看答案!
您认为本题答案有误,我们将认真、仔细核查,如果您知道正确答案,欢迎您来纠错
 重要提示:
请勿将账号共享给其他人使用,违者账号将被封禁!
重要提示:
请勿将账号共享给其他人使用,违者账号将被封禁!
 题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
 客服
客服
 TOP
TOP

 警告:系统检测到您的账号存在安全风险
警告:系统检测到您的账号存在安全风险


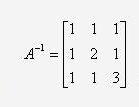 ,则A的伴随矩阵A*的逆矩阵为()。
,则A的伴随矩阵A*的逆矩阵为()。